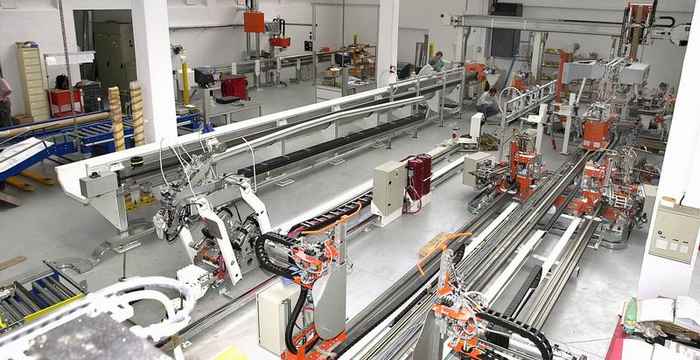
| Au début des années 2000, le projet CMAP comprenait un élément "phare": le PAPP, le Poste Automatisé de Pliage des Parachutes. Un prototype a été développé par la société Clemessy, implantée à Mulhouse. Cette "machine" robotisée devait pouvoir visiter et plier la voilure du parachute TAP 696-26 F2, la rentrer dans le sac suspentes premières et lover les suspentes. Un PAPP comprenait 3 postes successifs : un plieur installait la voilure sur le premier en s'assurant de son démêlage et du bon état des suspentes et des élévateurs. Par rotation de la voilure, une armée de caméras traquait les détériorations qu'elle présentait à un superviseur sur un écran d'ordinateur. Si la voilure était déclarée "bon état", elle était mécaniquement pliée en position sapin puis portefeuille sur le deuxième poste puis introduite dans le sac suspentes premières. Sur le 3° poste, les suspentes étaient lovées après qu'un plieur ait mis en place les bracelets de lovage dans des doigts mécaniques. Le travail robotique s'arrêtait là et un plieur "humain" finissait le conditionnement en assemblant la voilure en SSP au sac-harnais et en lovant la SOA. |
|||
|
|||
| Seuls les personnels de la STAT ont sauté avec des parachutes pliés par le PAPP; mais malgré l'implication de l'équipe de Clemessy, le manque de fiabilité et de performances du PAPP ont eu raison du projet qui a été abandonné peu de temps avant l'inauguration de la CMAP en 2004. Le prototype a été détruit quelques années plus tard... à la pelleteuse ! |
|||
|
|||
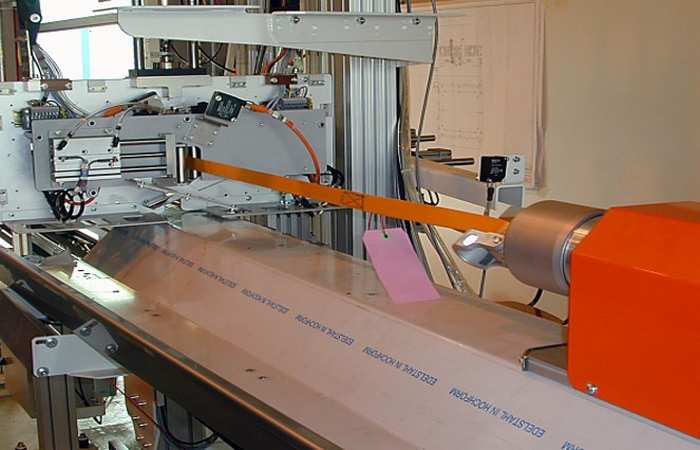
En même temps que le PAPP, la société Clemessy a développé un PAPP SOA, machine robotisée destinée à visiter et pré-lover les sangles d'ouverture automatique de 696-26 F2. A l'instar du PAPP, des caméras scrutaient la sangle à la recherche de détériorations et les présentaient à un superviseur posté devant son écran d'ordinateur. Le robot vérifiait en plus le fonctionnement du linguet du mousqueton et mesurait la sangle.
|
|||
| Après quelques années de fonctionnement à la CMAP, ce robot unique a été mis à la retraite, lui aussi par manque de fiabilité et surtout de rentabilité. | |||
| Source article: Patrick LEFEBVRE (coin's 391). |